近年来,随着我国经济的快速发展,具有高大内部空间结构的体育馆、酒店等建筑大量增加。对这些建筑进行安装、维护、装饰、清洁等作业时一必须要有高空作业设备。蜘蛛式高空作业平台具有4条独立的蜘蛛式液控支腿,能获得较大的支撑面积。支腿收起后尺寸小,具有可靠性高、作业效率高和工作范围广、适应性强等优点。高空作业平台作业时,底盘上的4条支腿下放使整个车体离地。但由工作业场地不平,可能导致底盘处十倾斜状态,降低了高空作业平台的抗倾覆稳定性,因此需要对底盘进行调平,以保证作业安全。借助AMESim软件对控制底盘调平的支腿液压系统做仿真分析,可在复杂土况下模拟平台的底盘调平过程,获得支腿液压系统的动态特性曲线,为今后液控支腿的设计提供参考。
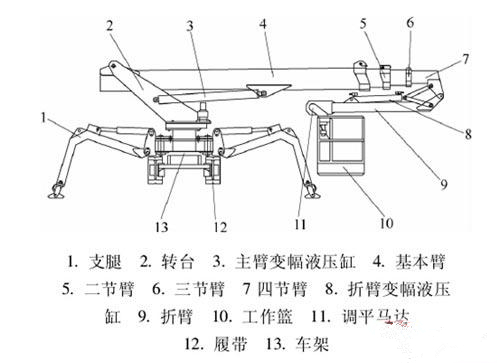
高空作业平台结构图
蜘蛛式高空作业平台主要结构及支腿液压系统
蜘蛛式高空作业平台主要结构
蜘蛛式高空作业平台的结构如图1所示,上车部分土作装置包括伸缩臂装置、折臂装置、篮体装置、回转装置;下车部分包括支腿装置、行走装置。
蜘蛛式高空作业平台的支腿液压系统
高空作业平台作业前,必须先将其4条支腿伸出,使整个车体起升离地,然后根据土作地点的实际情况,单独操纵一条或同时一操纵多条支腿动作使下车底盘处十水平状态,以提高作业过程中的抗倾覆能力。支腿使整个车身离地,既能延长底盘的使用寿命也能扩大高空作业平台的作业范围。
蜘蛛式高空作业平台底盘调平系统
蜘蛛式高空作业平台的调平系统的组成
调平系统由检测装置、控制装置和调平执行机构组成。检测装置为安装十底盘上的双轴倾角传感器、支腿上的微动开关和压力传感器,其中双轴传感器用来检测底盘的倾斜度,其检测值作为系统调平控制的依据,检测精度直接影响着底盘调平精度。控制装置为PLC控制和电磁比例阀操控手柄、电磁换向阀通电按钮。调平执行机构主要由4组带有自锁功能的阀控单杆活塞液压缸和电磁阀组成。
文中内容、图片均来源于网络,如有版权问题请联系本站删除!