为解决高压线路人工带电作业带来的安全问题,运想重工利用Solidworks设计了高空带电作业车机械手的绝缘机构、旋转台、机械臂、液压机构、机械手末端、专用夹具等,通过分析机械手动作的实现原理及各部件的相互驱动关系,并利用Solidworks的运动仿真功能进行了取线、对准与接线、断线工作的模拟分析。运想设计的该机械手可通过末端换刀装置的切换满足不同工作的需要,而且采用压线夹方式接线使得接线安全可靠,另外操作人员不与高压电线接触,并距离接线位置数米以上,也保证了操作人员的绝对安全。
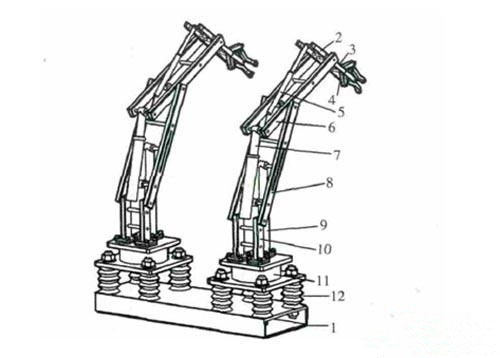
图为高空带电作业车机械手总装配图
图解:1底座2.第一小臂3.第一末端机构液压缸4.第一末端机构5第一小臂液压缸6第一上臂7第一上臂液压缸8.第一中臂9第一中臂液压缸10.第一下臂11.第一旋转台12.绝缘部件
高空带电作业车主要用于在供电系统不断电的情况下,对高压线路进行检修、部件更换或测试等带电作业,从而最大限度的减少因停电而造成的损失,同时又适合于一般的高空作业。过去几十年里,带电作业都是人工完成的,即人工带电作业,人工带电作业存在着许多缺陷,(1)带电作业在实践中存在安全方面的重大威胁,也给从业人员的心理造成很大的压力;(2)带电作业所需设备复杂,造价昂贵,对从业人员的技术水平和熟悉程度要求都很高,限制了人工带电作业的发展;(3)从输电线路的发展来看,为了减少线路走廊的空间,今后将会出现紧凑型杆塔的线路,这种类型的线路,会给人工带电作业的安全带来更大的困难。而使用机械手作业可以提高配电可靠性,提高带电作业人员的人身安全,降低作业的劳动强度,提高带电作业的自动化水平。
高空带电作业车主要组成部分有拖动汽车及其底盘、升降系统、机械手、机械手设计的关键是高空带电作业车机械手机构的设计。绝缘安全和专用夹具设计,基于SolidWorks设计的高空带电作业车机械手主要由如下部分组成:底座、绝缘机构、旋转台、机械臂、液压机构、机械手末端、专用夹具等,如图所示:
机械手本体安装于作业平台上,共两个机械手,每个机械手包括旋转台,8 个机械臂,4个液压缸,一个机械手末端,8个夹具。机械手以主从遥控方式,利用机械手末端所携带的相应专用工具,可以完成10kw线路的带电断线、带电接线、带电修补导线、带电更换绝缘子、带电更换跌落开关、带电更换避雷器等。并且,它所能完成10kw线路带电作业工作的种类和质量跟机械手末端所携带的专用工具也是密切相关的.如携带断线钳时,可以剪断导线;携带压线钳时,可以接线,机械手末端结构,如图,所示.操作人员在绝缘斗内进行操作,采用人机交互智能控制技术来控制作业机械手完成相应的带电作业工作。
文中内容、图片均来源于网络,如有版权问题请联系本站删除!